![]()
![]()


2013年04月08日08:47 來源:人民網-財經頻道
【相關新聞】
在日本新能源產業技術綜合開發機構(NEDO)於2月20日舉辦的“災害應對無人化系統研發項目”成果報告會上,東芝、日立制作所和三菱重工等大型廠商以及大學風險企業日本移動機器人研究所、CYBERDYNE公開了多台核電機器人及裝置等。該項目計劃匯集日本全國的機器人技術,用於東京電力福島第一核電站設的機房內。
匯集各大公司的拿手技術
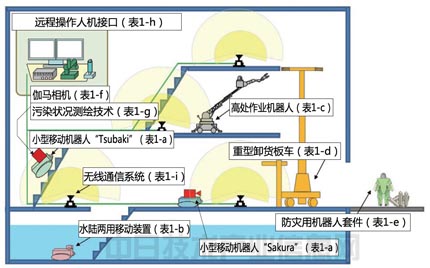
此前也曾向福島核電站內投放過機器人,不過其活動基本上僅限於確認一樓的情況及檢測輻測量。有時機器人還會被卡住,以至於無法進行檢測。此次項目基於上述經驗,從東京電力獲得了關於樓梯寬度和傾斜角度等機房內部的詳細信息,並根據這些信息提高了由機器人、支援裝置、基礎技術及通用技術組成的綜合系統在核電站現場的實踐能力(圖)。
 |
|
圖:多種機器人與裝置實現聯動 有望檢測此前基本上沒有調查過的二樓和三樓的輻射情況,並查明地下受到放射性物質污染的污水泄漏位置。 |
NEDO表示,“此次這些機器人的目的限定於檢測此前基本上沒有觸及的二樓和三樓的輻射量,以及查明地下被放射性物質污染的污水的泄漏位置”。為了探明需要何種程度的性能、會發生什麼樣的故障,項目組在千葉工業大學內建造了一個再現機房內部構造的實驗設施,以便一邊確認機器人和裝置的運行情況以及穿越能力等,一邊推進開發。
比如,要想檢測二樓和三樓的輻射量,就需要配備輻射檢測裝置、機動性出色的小型移動機器人,但僅有這些還不夠。為了確保小型機器人的移動路徑通暢,還需要清除瓦礫、打開大門等作業。此次項目主要致力於開發可對移動機器人活動提供支援的裝置。
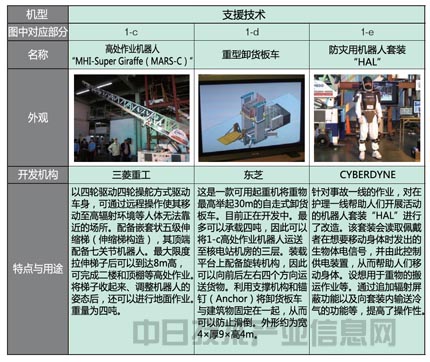
例如,移動機器人研究所開發的小型移動機器人“Tsubaki ”,可以在配備較重的γ射線檢測裝置的情況下上樓梯到達二樓和三樓,但是如果移動路徑上布滿瓦礫,“Tsubaki ”就無法發揮作用了。因此,有廠商開發出了可確保Tsubaki移動路徑暢通的高處作業機器人以及重物裝載平板車(表)。
 |
 |
 |
高處作業機器人由三菱重工開發,伸長梯子后,七關節機器人能在最高8米的高度作業。比如,如果二樓有阻礙機器人通行的管子,就可以將其切斷。
另外,東芝開發出了可以將最多重達四噸的機器人(包括三菱重工開發的高處作業機器人在內)、裝置和物資等運至二樓和三樓的裝載平板車。如果這輛平板車能將日立工程及服務公司和日立建機開發的瓦礫處理能力較高的機器人“ASTACO-SoTa”搬運到樓上,就可以有效確保小型機器人移動路徑的通暢。
NEDO稱:“東京電力正考慮將此次開發的機器人應用到福島第一核電站。我們希望盡快投放。”(日經技術在線 供稿)
