![]()
![]()


2014年07月21日08:45
【相关新闻】
日本沙迪克开发出金属3D打印机,粉末熔融凝固和切削加工相结合
压缩成本:爱德克斯面向HEV开发成本减半的再生协调制动系统
爱德克斯公司开发出了混合动力车(HEV)用再生协调制动系统“ESC再生协调制动系统”。与汽油车配备的现行系统相比,成本能够降低一半。

左为ESC单元,成本降低一半。右为助推器。
一般来说,ESC单元都会内置电动油压泵(马达与油压泵),来产生车体侧滑时及自适应巡航控制(ACC)控制车距等所需的“紧急”制动力。而新的再生协调制动系统则是对电动油压泵产生的制动力的常时(tsunetoki)利用,其结果是省去了要“常时”使用的蓄能器(蓄压器)和电动泵。还与现行系统的部件实现了通用化。
压缩成本:电装展示体积减半的EGR阀单元,成本压缩40%
电装展出了柴油发动机用小型EGR(废气再循环)阀单元。体积比以往产品缩小了约1/2。通过减少使用的部件数量,成本可降低约40%。
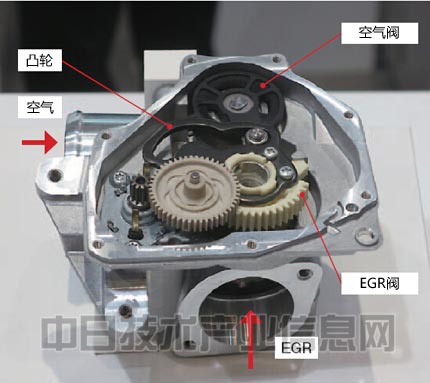
通过使用凸轮连接两个阀门缩小了体积。
在构成柴油发动机的LPL-EGR系统的部件中,进气节流阀与EGR阀连在一起。借助连接两个阀门的凸轮,二者可实现联动,将过去开闭阀门所需的两个马达和检测阀门开关角度的传感器等减少至一个。能够使体积缩小约48%,成本降低约40%。通过改变凸轮的形状,可适用于更多的发动机。欧洲的乘用车企业预定在2015年4月之前采用这种阀单元。
自动驾驶:ZMP展示以HEV为原型的实验车,实现时速60km的自动驾驶

以“普锐斯”为原型的实验车“RoboCar HV”。
日本ZMP公司公开了在时速为60km的自动驾驶技术实验(2014年5月实施)中使用的车辆和记录实验过程的视频。实验车是以丰田的HEV(混合动力车)“普锐斯”为原型的自动驾驶汽车“RoboCar HV”。该车根据其两侧安装的红外线激光雷达的信息,通过推测自身位置进行行驶(Simultaneous Localization and Mapping,SLAM技术)。使用车头的红外线激光雷达和车内的立体摄像头检测车辆前方的危险物体。

车身两侧安装的红外线激光雷达。

用来检测前方危险物体的立体摄像头。
自动驾驶:TTDC公开按照设置踩放踏板的驾驶操作机器人
丰田技术开发公司(TTDC,总部:爱知县丰田市)展出了代替驾驶员操作油门和刹车的机器人。这种机器人可以根据设定的数值踩下油门和刹车的踏板,实现精确定量的驾驶试验。还可以用来检测改变踩踏力和时间时车辆的行为数据。

替代驾驶员操作油门和刹车。
致动器配置在驾驶员脚下。致动器的冲程为130mm,额定推力为200N,重18kg。控制单元重12kg。机器人目前仍在开发阶段,TTDC今后还计划开发可操作方向盘的机器人。设想的需求是汽车企业的车辆实验等。(未完待续)(日经技术在线!供稿)
