![]()
![]()


2014��03��26��10:46
���á��Ȳ����ѵ�һ�С��˷�����
�ڽ�������У������ƶ����Է���Ӫʱ����Ҫ�����ӷ�ת�����ij���һö���ӡ������������ֺ���ͨ�����ϲ���ס������ʵ�ַ�ת���ӵĶ�������װҲ�����ǹ������Ϊ��ס���Ӷ��˲�λ����״����ÿ�����ӵĴ�С����һ������������뷨������ʵ��
����̫��Ϥ���塱����������ˡ�ʹ��˫�ۻ����ˡ��Ľ��顣����Ϊ������õ��������ӵĽ��������ִ�����������Ľ���δ�����ɡ�
��ˣ���װ������ˡ��Ȳ����ѵ�һ�С���������Ǿ����ڽ�����������ר��̨���������������̨���ϣ�Ȼ�����һ����ס���ٷŵ������ϡ��ڵ�һ���У��������ڵ�94���������һ������

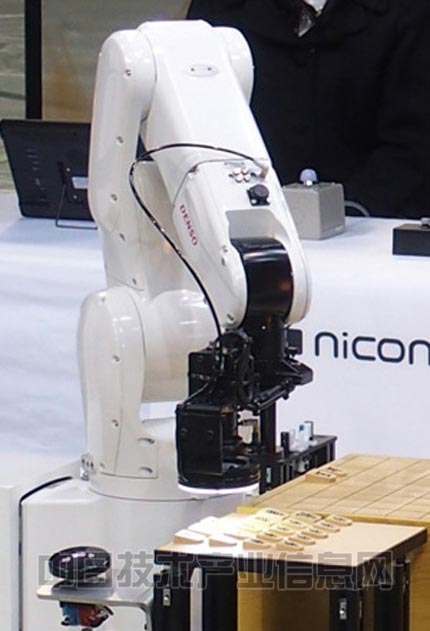
�������Ա�������������ʱʹ�õ�̨��
�����ֶ��˵ĵƻ���һ�£�ȷʶ��Ŀ������
�����˵�ͼ��ʶ����Ҳ�õ�װ������һ����˼��������Ҫ����ʹ�õĽ�������ȫ���ɹ����ֹ�������ÿ�����Ӷ���ϸ��𡣾�������ܣ�Ϊ��ȷ�жϳ��������ӣ������������ӵ�ͼ���������ݿ��Թ�ʶ��
��ʽ����ʹ�õĽ����̿���ȥ��ƽ�ģ������ܲ���ʱ�ͻᷢ�����벿��Ҫ�߳�0.7mm�����ң����ֵ����巽ʽҲ������ͬ���еĽ����ӷ�������м䣬�е��������²��������ֵĽǶ��������������������ƽ�롣������ʱ��Ϊ����ʱ�������Ӷ���������б�š���������ܣ��˴ν���Щ����������Ҳ�����˽�ȥ��ʹ���������������ϰ�ʶ�����ӡ�
������¶�������ʺϽ����̴�С�Ļ����˱����dzߴ����һȦ��VS-060����������10�����ҵ���б�ǡ�ԭ�������ֺͺ���ҪӦ���෴�ĽǶȣ���˻����ֵĶ����ܵ���Լ��������VS-060�ijߴ��Դ�һЩ������������ѹ�������������ͼ�������й����ԣ���˵�װ����ѡ�����Բ�����͵�V-050����װͨ���Ľ������ֵĶ����Ƚ���˴��ڵ����⡣
�ۿ���һ�ֱ�����ְҵ���ּ����尮���߳���˵���������־��ܿɰ�������װ������Ŭ���ƺ�������Ч����
�����־������ɵ�װWAVE���Կ�����ɵġ��������е���֡�����������ͷ�ֱ�õ���Pokka System��˾��Macsystems��˾�����ֵ�빫˾�İ��������ҹ�˾Ϊƽʱʹ�õ�װWAVE��Ʒ�Ĺ˿ͣ�ͬʱҲ�Ǹù�˾�IJ�Ʒ����������顣
�������˵����������ô��ҲҪ���Ե���������1����Ѯ��ʼȫ�濪��������������ʵֻ��һ���¶�һ�㡣�dz���л��Щ��˾���������Ϊ��æ��ʱ��Ϊ�����ṩ��������

��װWAVE��������v
�����־�����������˳������˵�һ�ֵ����ж�������ȴ������˶��ɾ�����Ϊ������;����Ĺ�ҵ�û����ˣ�����������벻���ġ����ӻ�������
����ս�ĵڶ��ֻ᳡Ϊ���������ݣ��������������ֻ᳡Ϊ����ҰHARUKAS�����棩�����ľֻ᳡ΪС��ԭ�ǣ�������С��ԭ�У�������ֻ᳡Ϊ�����ݣ��������������������ݣ������ڶ�ʱ������ɵ����־��İ�װ���ڰ���ҰHARUKAS�������˽������������չ��ߵĿ��飬���ͼ��ʶ�����Ӱ����ⲿ���߽���ʱ�����仯��С��ԭ�Ǽ������ݵİ�װ����Ϊ���ף���Ҫ����һ����˼��ȷ�����˻����˵�ͨ����
����ƣ������֡��ڹ���Ҳ����û��һ���ھͰ�װ��ϵ����������ش�150Kg��200Kg�ĵ����־���Ҫ�ڰ���ʱ��������֡��������ֳ�������װ���������о��ܶ�λ֮���ٰ�װ�����ң�����Ҫʹ��100����Դ������ԭ����200����Դ��
����ƣ�����������־�ֹͣ��������ֻ���Լ���������������ˡ��������뿪��Ц�Ļ�������ᵽ������ԱҪ���ⳡ����֧�ֵ��ľ��ġ�
�ձ��������ս��һ�������������ļ��ҽ��𣬶�֧���ⳡ��������һ������ʵ������ͬ��Ҳֵ�ù�ע�������ߣ���� ��¡���վ��������ߣ����壩
 |
