![]()
![]()


2014年05月27日09:21
【新闻链接】
生物电子诞生(一)生物体内的宝藏,将带来控制、传感器和节能革命
一盘磁带容量达154TB !IBM和富士胶片创磁带存储密度新记录
人工制造昆虫脑
通过模仿昆虫脑控制机器人――东京大学尖端科学技术研究中心副所长、生命智能系统领域教授神崎亮平率领的研究组正在开展这项研究。
与人等哺乳类动物相比,昆虫的脑极其简单。有研究表明,组成人脑的神经细胞有1011个,而昆虫只有105~106个左右。尽管如此,昆虫依然具备巧妙躲开障碍物,在发生危险前面隐蔽自己的能力。而且,对于危险的反应速度比人还要快。在存在外部干扰的情况下,还能对干扰进行修正。也就是说,“只要能够人工制造出昆虫的脑,就可以制造出前所未有的节能、机敏的高性能机器人”(神崎)。
为了了解昆虫脑,神崎研究组研究的对象,是家蚕蛾对特定的气味物质(信息素)做出反应并向其移动的神经网络。
通过神经的可视化制造人工脑
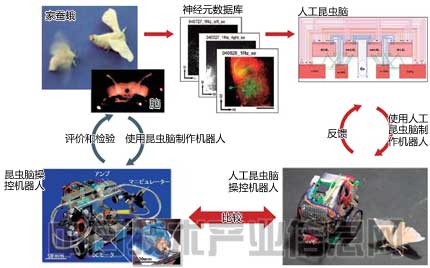
研究大致分为两个方向。一是解明昆虫脑的回路结构,制造出人工脑,使用人工脑驱动机器人。二是直接使用昆虫脑驱动机器人。研究组希望通过二者的比较研究,对人工脑进行修正和拓展,从而提高人工脑的精度(图5)。
 |
|
图5:对昆虫脑实施IC化 通过解明家蚕蛾朝信息素发生源的方向移动的脑结构,制造人工脑,用来驱动机器人。(图:《日经电子》根据东京大学的资料制作) |
人工脑的制作方式如下。首先,向昆虫脑的神经细胞中插入含有荧光色素的玻璃管电极,通入微弱电流,对细胞进行荧光染色,利用共焦激光扫描显微镜观察,测量每个神经细胞的三维结构。然后,根据三维结构,利用单个的神经细胞构建神经回路(网络),明确家蚕蛾脑神经回路的概要。
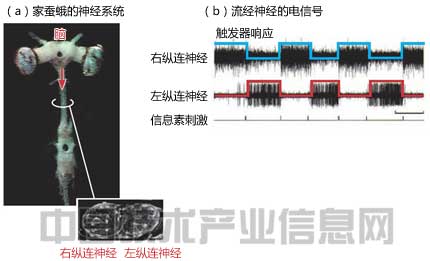
为了揭示把气味物质检测转化为运动的神经网络,研究组还特别调查了昆虫脑在检测信息素时把信息传送到运动系统的方式。结果发现,运动系统接收到了与触发器电路相同的信号(图6)。而通过对生成信号的神经细胞顺藤摸瓜,与信息素检测到运动全过程相关的神经网络也水落石出。
 |
|
图6:家蚕蛾的运动系统是触发器响应 在制作使用昆虫脑驱动的机器人的过程中,研究组发现了左右的动作是通过触发器响应的方式传送。动作通过信号的长短表现。(图:《日经电子》根据东京大学的资料制作) |
而且,研究组还利用程序模仿检测气味物质并激发动作的神经网络,制成了人工脑。
在超级计算机上重现昆虫脑
直接使用昆虫脑控制的机器人分为两种。一种是家蚕蛾利用自己的腿控制的机器人“昆虫操控机器人”,一种是取下家蚕蛾的头部,只利用脑的“昆虫脑操控机器人”。
昆虫操控机器人是把家蚕蛾放置到可以自由旋转、类似于乒乓球的球体上,用家蚕蛾进行控制。当家蚕蛾活动腿脚,向目标方向前进的时候,球会随之运动,此时,传感器将检测到动作。根据信号,机器人会做出相应的动作。昆虫脑操控机器人则是取下家蚕蛾的头部,通过检测传导至运动系统的触发器信号,利用这种神经信号驱动机器人。
通过研究利用昆虫脑的机器人,研究组发现,即使让致动器的动作比家蚕蛾的脑做出反应延时约600ms,或是沿左右方向做不对称动作,家蚕蛾的脑也能对这些外部干扰进行纠正。
神崎研究组认为,通过对比使用人工脑和昆虫脑的机器人并不断改进,能够制造出抗干扰能力强的机器人。现在,利用超级计算机“京”重现家蚕蛾更详细的神经回路,实施模拟其功能的研究也在进行中。如果这项研究取得成功,人们将有可能对基于脑设计图的神经回路功能进行检验和预测,制造出更接近昆虫脑的人工脑。
考察蟋蟀的回避能力
神崎也与日产汽车开展了合作研究。研究的内容是具备蜂类和蟋蟀的回避能力的机器人。
其中,日产汽车对蟋蟀的回避能力寄予了强烈关注。因为当接近的移动体和障碍物不止一个时,蟋蟀能够为其排定优先顺序,有效进行回避。与之相比,EPORO只能避开近处的障碍物,无法像蟋蟀那样排序。
神崎表示,在为机器人赋予蟋蟀的回避能力后,机器人在模拟中,依次避开了16个移动体。实际试制的机器人也成功避开了多个移动体。(作者:根津祯、中道理,日经技术在线!供稿)
