![]()
![]()


2014年05月26日08:39
【新闻链接】
生物电子诞生(一)生物体内的宝藏,将带来控制、传感器和节能革命
一盘磁带容量达154TB !IBM和富士胶片创磁带存储密度新记录
鱼、昆虫只有简单的脑,黏菌甚至根本没有脑。但与人类相比,这些生物的动作性能却非常高。通过分析其机制,可以实现前所未有的聪明控制。
“迄今仿生制造的着眼点大多是生物的‘物(结构)’。而今后,研究生物的动作及其原理,也就是‘事’将更加重要”。
控制技术专家、大阪大学研究生院工学研究科机械工学专业教授大须贺公一强调说。大须贺是“仿事”的提倡者,就是从控制的角度来看生物的动作和活动等,解明并利用生物的控制结构。意图是通过探求其本质,获得“放之生物而皆准”的知识。
大须贺指出,东北大学电气通信研究所教授石黑章夫的研究成果就是仿生技术的一个好例子。石黑发现生物具备的自主分布式控制的原理,并将其应用于四足行走机器人,使机器人实现了像马一样的自然行走。
此前的行走机器人大多采取的是依赖高性能中央运算装置的“集中式强压控制方法”(石黑)。而自然界连没有脑的原始生物,也能相应于无法预测的环境变化而移动。就是说,即使没有高性能的中央运算装置,也有可能实现像生物那样灵活的动作。这是因为生物体的动作是以自主分散的控制方法进行的,其体内分散配置的各个单元都会自主地协调动作。实际上,在某些昆虫的体内,存在着名为“扩散神经”的分散式神经网络。
研究真黏菌的动作
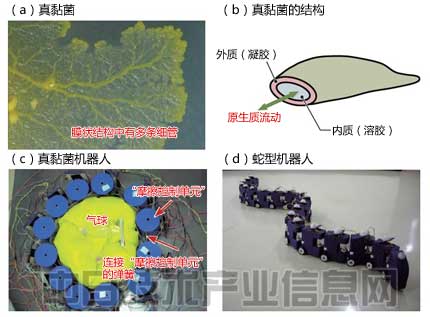
在研究生物的自主分布式控制方式的时候,石黑把目光对准了结构和动作单一的“真黏菌”(图1)。这是“变形菌”的一种,没有脑和神经。即便如此,这种菌依然会像动物一样到处寻找食物。真黏菌由溶胶状的“内质(原生质)”与凝胶状的“外质”组成。在移动时,真黏菌是通过外质各个部分的收缩、舒张,使内质发生流动,从而带动身体运动。
 |
|
图1:试制模拟真黏菌的机器人 东北大学试制了真黏菌型机器人(a)。真黏菌由溶胶状的“内质”和凝胶状的“外质”组成(b)。装满水的气球充当内质,配置在气球周围的多个“摩擦控制单元”通过弹簧连接成环状,作为外质(c)。真黏菌的自律控制规则运用于蛇型机器人,成功对其进行了驱动(d)。(图:《日经电子》根据东北大学的资料制作) |
石黑为了探索真黏菌的自主分布式控制方法,试制出了模仿真黏菌的机器人。用装满水的气球代替内质部分。外质采用的则是用弹簧连接多个机械单元(摩擦控制单元)组成的环状体。
弹簧既能被动也能主动运动。这款机器人的原理,是在调整弹簧的长度和摩擦控制单元与地面之间的摩擦系数的同时,通过挤压、拉伸内部的气球,使整体实现移动。
石黑为这台机器人采用自己推测出的自主分布式控制规则,在驱动机器人运动后,再根据结果修改自主分布式控制规则,重新在机器人身上进行尝试。经过不断摸索,终于得到了动作与实际真黏菌一致的自主分布式控制规则。其重点是在弹簧伸缩的时候,增加调整伸缩时间(相位)的项目,以防止弹簧承受超出其能力范围的力。在这一项目中,要以“差距函数”减少为前提,调整伸缩的时机。差距函数以公式的形式,表现出了控制系统与机构系统、周围环境之间产生的“差距”。
具有普遍性的龃龉函数
石黑发现,通过真黏菌得到的自主分布式控制规则与很多生物相通之处颇多。实际上,在对蛇型机器人直接采用这种自主分布式控制规则后,与石黑开发的老式蛇型机器人相比,其动作更接近于真蛇。当然,蛇的结构比真黏菌复杂得多,要想实现更接近蛇的动作,还需要研究出专用的自主分布式控制规则。
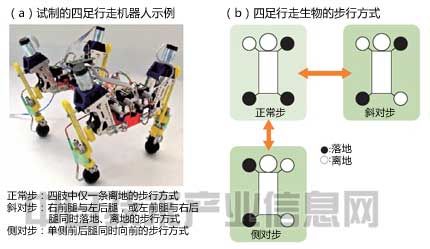
然而,“基于龃龉函数的设计方案可以运用于其他生物的自主分布式控制规则”(石黑)。根据这一思路,石黑成功试制出了四足行走机器人(图2)。并且通过这台机器人,得到了能够像马、猫等四足行走的动物一样运动的自主分布式控制规则。这种控制规则“适用于马、骆驼、猫等所有四足行走的生物”(石黑)。四足行走生物实际的行走方式存在许多差异,例如四肢中只有一条离地的“正常步”,右前腿和左后腿对角线同时落地、离地的“斜对步”等。这是“因为每种动物的重心不同”(石黑)。实际上,在四足行走的自主分布式控制规则中加入不同动物的重心信息后,行走方式也会随之改变。使猫像猫,马像马,骆驼像骆驼那样行走。
 |
|
图2:流畅的四足行走成为现实 东北大学为试制的多种四足行走机器人采用了真黏菌的自律控制规则(a)。在实验过程中,又发现了能够实现“正常步”、“斜对步”、“侧对步”等四足行走的公式(b)。(图:《日经电子》根据东北大学的资料制作) |
而且,试制的四足行走机器人可以从静止状态马上进入行走状态。一条腿发生故障时,其他腿会采取相应的动作,消除故障的影响。
今后,石黑还将把范围扩大到双足行走机器人、海星型机器人等众多机器人,继续致力于研究不同生物的自主分布式控制规则。
 |
