![]()
![]()


2014年06月17日08:59
【相关新闻】
日产商用EV“e-NV200”10月上市,续航距离185~190km
富士通研究所开发了用汽车黑匣子用的广角摄像头进行车道偏离报警的技术。原来的车道偏离警报需要使用可显示远方白线、视角30度左右的专用摄像头,而用只能显示近处部分白线、视角130度左右的汽车黑匣子用摄像头,是无法准确检测车道线的。富士通研开发出了由广角摄像头拍摄的多张图片来推断车道线形状的技术,在不使用专用摄像头的情况下,在汽车黑匣子上追加了车道偏离警告功能。
原来要利用广角摄像头的图像来实现车道偏离警报功能时,在车道线为虚线且道路转弯时,以及为了促使车辆减速在车道线内侧画有短虚线的辅助线时,容易发生车道线识别错误。富士通研开发了推断技术可应对这两种图案的车道线形状。
遇到虚线弯路时也可实时识别
在车道线为虚线且道路转弯时,窄角摄像头可沿着道路观测多条白线虚线,而广角摄像头只能显示远方的区域,因此只能观测左右一对虚线。由于虚线长度只有8m左右,因此这样无法判断出弯路的弯曲,以原来的方式使用广角摄像头,就会将弯路误认为直路,从而发生对车辆与白线间的距离的误判。
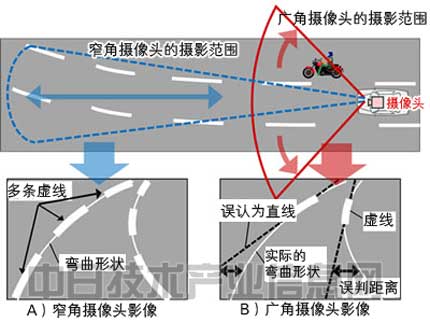 |
| 在虚线弯路上推断车道线形状的以往方法 (图片由富士通研究所提供) |
对此,富士通研着眼于短时间内道路线形状变化不大这一点,诸如将每100ms的时间序列的多张图像中的虚线连接起来,由此来复原车道线。由于随着车的移动,白线位置会逐张偏移,因此将车辆的移动按照横移(等速移动)和转弯(等速转弯)建模。并根据时间序列的白线图像,使用车辆移动模型,制成以移动的影响修正的路面合成图像。也就是说,通过合成图像的白线来推断车道线的形状。
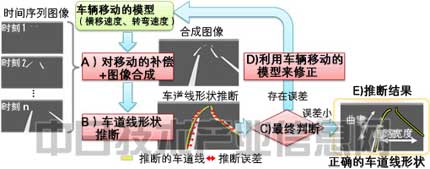 |
| 对车辆移动造成的偏移实施修正 (图片由富士通研究所提供) |
另外,为了确保实时性,还开发了新的算法,弯曲曲率使用最新的车辆前方的多张图像的上述方法来计算,而剩余的车道线形状(道路宽度及车辆朝向等)则以即时的单张图像来计算。弯曲曲率在短时间内变化不大,因此用之前最新的图像来计算,车道线形状的推断精度也几乎不会下降。
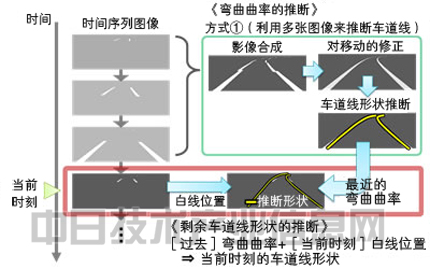 |
| 弯曲曲率利用多张图像来推断,而道路宽度等利用单张图像来推断 (图片由富士通研究所提供) |
有辅助线时也不会误判道路宽度
在大幅转弯的道路上,为了促使车辆减速,车道线内侧会铺设短虚线的辅助线,形成多重车道线,这时用广角摄像头来拍摄的话,由于广角的分辨率不够,无法将内侧的辅助线与实际的车道线区分开来。这样就会将内侧的辅助线误认为行驶车道线,对车辆与实际车道线之间的距离做出误判。
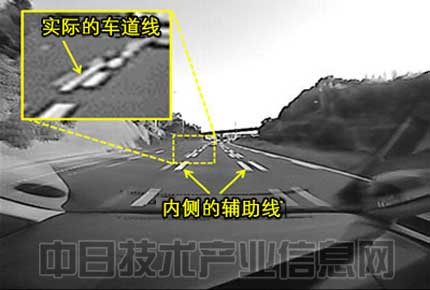 |
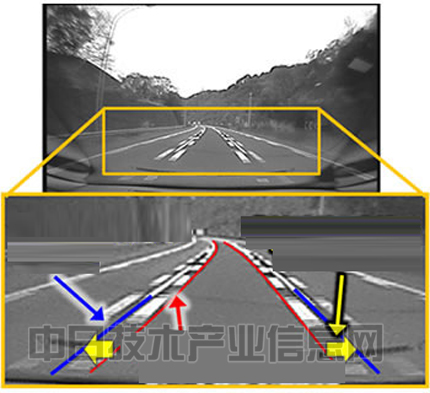
| 用广角摄像头拍摄的多重车道线 (图片由富士通研究所提供) |
富士通研将着眼点放在了多重车道线中的内侧辅助线与实际车道线保持一定距离平行铺设于内侧的情况。由此开发出了新的方式:先利用内侧的辅助线来推断出假设的车道线形状,然后随着行驶,当实际的车道线位于车辆近旁、变大显示出来时,使用计测获得的辅助车道线与车实际车道线间的偏移量,来修正假设的道路宽度。
 |
| 修正道路宽度 (图片由富士通研究所提供) |
富士通研利用在实际道路上广角摄像头拍摄的影像数据(160分钟),对这些新开发的技术实施了评测,结果表明,与原来的方式相比,能够在约2倍的、比例高达96%的时间里,以30cm以下的误差来计测车辆与白线之间的距离。另外还证实,对于总计460次的车道变更,能够以95%的精度对车道偏离现象准确做出警告。
富士通研将力争2014年度内使该技术达到实用水平。除了对驾驶员的报警用途之外,该公司还打算拓展该技术的应用范围,根据汽车黑匣子获得的行驶偏离状态的数据来分析驾驶风险。(作者:赤坂 麻实,日经技术在线!供稿)
