![]()
![]()


2012年11月21日09:58 来源:人民网-财经频道
2012年5月,本田公司公开了电动独轮车“UNI-CUB”。为了推动实用化,目前正在位于东京台场的日本科学未来馆中进行实证实验。设想用作机场及购物中心等大型设施中的移动工具。
“机场、购物中心及水族馆等室内设施正在向大型化发展,人们在其中的逗留时间及移动时间增多,因此需要备有以前没有的‘个人交通工具’。‘UNI-CUB’就是一款可满足既安全又能高效率移动这种需求的全新交通工具”,本田技研研究所二轮R&D中心策划室主任研究员末田健一这样介绍说。
仅需倾斜身体即可控制转向
UNI-CUB是本田技研开发的电动独轮车。仅需将上半身稍稍向希望去的方向倾斜,即可随意向前后、左右及斜向等所有方向移动。并且,与以往的独轮车和自行车不同,停下时不会倾倒,能够稳稳立于原地,此外还能够以车轮与地面的接触点为中心,进行360度旋转。即使没有经过练习,在骑上车的瞬间就能立刻凭直觉操纵车辆,这也是其特点之一。


“UNI-CUB(UNI-CUB)”。“UNI”源自Unicycle,Unique,Universal 。其设计乍看就像一只企鹅。
只是通过改变上半身的重心来操控车辆,因此可简单地配合旁边行人的步调,也不存在像汽车和摩托车那样突然加速的危险。即使在机场和购物中心等人流量较大的室内设施中,也不会给周围行人带来压力和恐惧感,可安心共享空间。
并且在使用方法方面,还可事先在UNI-CUB中输入参观路线及速度,使参观者能够顺利按照预定时间参观博物馆和展会等,而不会出现迷路的情况。
末田说:“说到通过移动重心行驶的个人交通工具,Segway比较有名。不过,UNI-CUB的最大特点在于可自由使用双手,车轮完全收纳于骑车人两脚内侧,这也是我们在开发时最注重的地方。”
这一想法的基础是本田长年以来一直坚持的“Man-Maximum?Mecha-Minimum(乘员空间最大化,机器空间最小化)”思想。

本田技研研究所二轮R&D中心策划室主任研究员末田健一
UNI-CUB的最高时速为6公里,充满电的续航距离为6公里,但通过改变电池容量,可改变性能指标。另外,如果将使用环境设定为适用无障碍空间,只要符合《无障碍法》标准的斜坡及台阶,就可毫不费力地通过。骑行者的体重设想为30~100公斤。
上市时间目前尚未确定。已从6月16日起,在东京台场日本科学未来馆投入使用,进行实证实验。遗憾的是,目前只有日本科学未来馆的解说员才能使用。根据验证实验的结果,或许参观者不久就能利用这一交通工具。
末田说:“我们本来打算通过实证实验,首先使人们了解到‘竟然有这样的交通工具’。不过,实证实验开始之后,由于该车太易于融入周围空间,因此也有许多参观者并未意识到独轮车的存在,这倒是令人高兴的失算。”
这样看来,UNI-CUB似乎已经达到了自然而然地融入人流量较大的空间这一理念要求。今后,为了使人们对之产生“自己也想骑”、“使用这种交通工具或许会比较方便”的想法,本田技研计划通过实证实验找出需要解决的问题,反复进行进行改良。
以较少部件实现安全可靠的驱动机构
UNI-CUB有两个技术关键。即可进行全方位移动的车轮机构“Honda Omni Traction Drive System(HOT驱动系统)”,和在类人机器人“阿西莫”研发过程中积累的平衡控制技术。
HOT驱动系统是在大车轮的圆周上配置一排小车轮的车轮机构。UNI-CUB的车轮配备有30多个小型车轮。
可通过转动大车轮进行前后移动,转动多个小车轮进行左右移动,并可通过组合使用大车轮及小车轮进行斜向移动。
顺便一提,此次UNI-CUB除了“主轮”外,还在主轮后部设置有“旋转车轮”。正如其名称一样,该车轮可使主轮以1点为中心进行360度旋转。

“Honda Omni Traction Drive System(HOT驱动系统)”
实际上,在大车轮的圆周上配置一排小车轮的车轮机构被称为“全方位轮”或者“全方位驱动车轮”,这并没有什么新奇之处。而HOT驱动系统的独特之处在于,不仅仅是大车轮,就连小车轮的移动都是通过计算机进行精密控制。这样能够使骑行者更顺利、更准确地驾车驶往自己想去的方向。
而且,对小车轮“统一”进行控制,而不是一个一个单独进行控制,这一点也颇具本田特色。
对于末田等研发人员来说,一个一个单独进行控制在技术方面并不困难。不过这样一来,便需要大量部件以及大电流电路,与末田等力争实现的低价位小型产品相距甚远。但如果不能完全控制小车轮,便无法实现精密的驱动。
末田说:“如何用较少的部件实现安全、可靠地进行驱动的机构,在这方面我们花费精力最多,也充分利用了本公司长年以来积累的相关技术。”
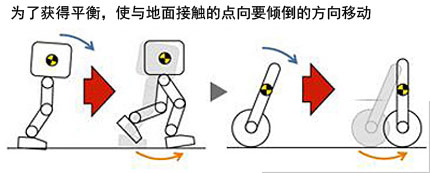
另一方面,平衡控制技术指的是保持重心平衡、防止摔倒的技术。
该技术是通过传感器检测UNI-CUB骑行者上半身移动所产生的重心倾斜,迅速判断骑行者想向哪个方向、以多快的速度移动。然后迅速将车轮向该方向移动,以保持重心平衡。不仅是向上半身倾斜的方向移动,而且上半身倾斜程度越大,车轮转速就越快,骑行速度也加快。
应该有许多人在小时候当值日生时,做过将扫帚一头放在手掌上,尽力使其保持平衡而不歪倒的游戏。UNI-CUB配备的平衡控制技术原理正是与之相同,是通过计算机控制得以实现的。
平衡控制技术
本田于2011年发布的UNI-CUB的原型为不能如意地移动重心的人配备了像游戏机一样的操纵杆。不过,此次采用了智能手机来替代操纵杆。用手指操作触摸面板画面上显示的操纵杆,便可指示移动方向。
顺便一提,笔者也进行了试骑,UNI-CUB的动作非常流畅,完全没有操纵交通工具的感觉。反而有一种宛如身体一部分的奇妙感觉。这的确是一种前所未有的交通工具。
配备阿西莫等的平衡控制技术
本田技术研究所的个人交通工具研发历史可以回溯到1989年。最初是在公司内部举行的新一代交通工具创意大赛上,展示了作为Segway前身的摩托车,以及利用旋转的大球移动的独球车。这些交通工具都是利用了平衡控制技术。
之后,随着研究设施等的增扩,在设施之间进行移动越来越麻烦。特别是负责将文件等送往各部门的工作人员,每天必须在设施内来回走动多达7到8公里,非常辛苦。
因此,本田技研以1989年发布的独球车为原型,在1994年开发出了小型独轮车。不过需要像Segway一样双手握住车把,虽然移动起来较为轻松,但不能自由使用双手。因此作为下一个目标,决定开发“无需用手”的技术。
不过之后开发进展得并不顺利。负责独轮车研发的研究人员开始致力于阿西莫等类人机器人的研发,独轮车研发被暂时缩小了规模。不过,通过研发类人机器人,平衡控制技术得到了大幅提高。因此,研究人员想,通过再次在独轮车中采用该平衡控制技术,就能够实现无需用手的个人交通工具了吧。
于是,15年之后,于2009年开发出了前一款产品“U3-X”。
U3-X最注重小型化及设计性。因此,虽然人骑上去也能仅靠一个车轮很好地保持平衡,但驱动力较低,路面稍有凹凸不平之处就会停住,无法继续前行。并且,由于没有配备旋转车轮,因此也无法像UNI-CUB一样在原地旋转。

无需用手的电动独轮车“U3-X”(右)与UNI-CUB
而UNI-CUB是对U3-X进行了改良,实现了较好的路况应对能力。
由于UNI-CUB比较注重实用性,因此末田等研发人员从车轮形状、尺寸到材质,进行了全面改进。
末田说:“我们试制了约100多种的机构,反复进行了实验。尤其是发现了将重点放在尽可能降低成本上,通过优化组合利用现有技术,可产生新的效果。虽然不能进行详细介绍,但对于技术人员来说,这个发现是UNI-CUB开发过程中最大的收获,非常有意义。”
本田技研今后将力争尽早实现UNI-CUB的商品化,并考虑通过将HOT驱动系统及平衡控制技术等应用于其他领域,推动新产品开发。
末田最后说道: “从自行车、摩托车、汽车、铁路到电梯,我们人类不断推进交通工具的发展,构筑了丰富的社会及城市。不过,有些场所仍需要采用像UNI-CUB这样的交通工具。这种需求也将随着时代的变化而变化。今后我们将继续开发受人们欢迎的交通工具,使更多人的生活质量得到提高,形成更丰富的社会。”(日经能源环境网 供稿)
