![]()
![]()


2014年06月27日14:34
【相关新闻】
宝马i3,与LEAF和i-MiEV的最大不同在于制动的减速感
电装通用车载空调:设计开发――鼓风机体积缩小15%,马达模块化
一款能在识别人的动作和自己位置的情况下自主飞行的小型飞行机器人在日本诞生。其开发者是由东京大学研究生院航空航天工程专业的一名博士生和一名硕士生组成的研究小组。

手掌大小的飞行机器人“Phenox”
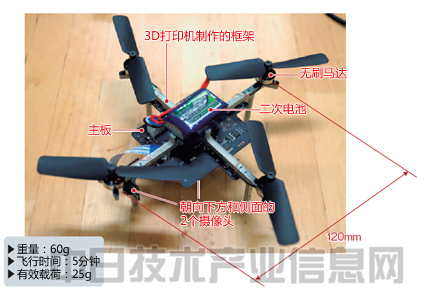
这台名叫“Phenox”的飞行机器人拥有4个旋翼,也就是所谓的“四轴飞行器”。对角马达的轴间距为120mm,总重量为60g,实现了可以放在掌心的小型化和轻量化,能够在识别周围的同时自主飞行(图1)。Phenox能够实现的动作包括:(1)识别伸出的手臂,在手臂上方悬停;(2)有人在下方挥动手臂时,向挥动的方向移动;(3)呼叫其名字将其唤回;(4)听到哨声后在地面降落等。
 |
|
图1:30台Kickstarter限量版很快销售一空 PhenoxLab开发的四轴飞行器“Phenox”。马达的轴距为120mm,重量为60g,虽然个头小,却具有利用摄像头和麦克风对人的动作做出反应的交互性。 |
PhenoxLab于2014年5月在众筹网站“Kickstarter”上立项,以750美元的价格,限量销售了30台实验室版Phenox。虽然二次电池、布线和印刷电路板都是裸露着固定在树脂框架上,但仅仅过了32个小时,30台Phenox便销售一空。
利用CPU内置FPGA
Phenox的心脏是内置ARM核心和FPGA模块的IC“Zynq-7000”。“Phenox能实现自主动作的基础就是这个FPGA,FPGA上安装了提取视频流的特征点,并对特征点进行描述的处理电路”(PhenoxLab首席工程师此村领)。初期试制品采用的结构是组合使用FPGA和微控制器IC,由微控制器上的软件根据FPGA的输出推测自身位置(3D座标)。
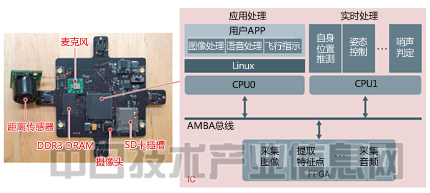
但现在已经改用内置2个CPU内核的Zynq,三大要素实现了联动。三大要素是(1)运行提取影像特征点等流处理的FPGA;(2)推测自身位置、控制马达转数的CPU;(3)实施系统整体控制、图像识别等应用处理的CPU(图2)。FPGA会把处理的结果写入DDR3插槽中的主内存,由2个CPU将这些数据用于操作和控制。
 |
|
图2:CPU内置FPGA安装了在飞行时推测自身位置的功能 使用配备2个“Cortex-A9”处理器内核和FPGA模块的IC。图像和音频的采集以及图像特征点的提取等预处理由FPGA模块内的电路执行,由CPU上的软件使用这些数据。2个CPU分别用于应用处理和实时处理。 |
可自由开发应用程序
Phenox的另一个特点,是使用者可以自由开发在Linux上运行的应用软件。Phenox配备了编译器,使用者可通过串行连接的终端改写程序。PhenoxLab交互设计师、工程师三好贤圣表示,作为“空间内的活动信息提示装置”,Phenox蕴藏着许多可能性。除了自己摸索之外,如果能有更多的人使用,或许还会催生出想象不到的用途”。
今后,PhenoxLab还计划试制配备距离图像传感器的飞行机器人,以及支持150g有效载荷的飞行机器人。“对于今后的开发方向,PhenoxLab将参考实验室版购买者的反馈做出决定”(此村)。(作者:竹居 智久,日经技术在线!供稿)
开发历程:
――请介绍一下Phenox的开发历程。

此村领(左)是东京大学研究生院工学系研究科航空航天工程专业的博士研究生,三好贤圣(右)是同一专业的硕士研究生
此村:出于从零开始制造四轴飞行器的想法,我从两年前开始开发。当时是从“通过板上处理实现小型飞行机器人”这个概念出发着手开发的。如果能实现利用电路板上的计算机和传感器自主运动的“板上处理”,就无需借助通信网络和地面的计算机。如果实现了小型化,机器人就能在室内和狭窄的场所穿梭。在开发了大约一年时间,机器人刚刚能够飞行的时候,恰好赶上了“未探索IT人才发掘培养事业”注的公开招募,于是我就邀请同一个研究室的三好,参加了这次招募。
注:“趣味与实用兼具的手掌尺寸飞行机器人系统”项目被日本2013年度未探索IT人才发掘培养事业采纳。
三好:我在参与Phenox之前,研究的是把飞船型机器人应用于空间照明等艺术类作品。与动作缓慢的飞船相比,直升机具有动作灵活、动作自由度大的特点。直升机型的飞行机器人或许能够创造出人与生物交流时的1对1关系,出于这样的想法,我参加了这个项目。
――请问是否有商业化计划?
此村:我们正在考虑与大学的TLO(技术转移机构)等合作成立风险企业。但我们并不会积极参与经营,而是打算继续从事研发。现在,我们正在摸索能够灵活地将自身位置推测等相关专利和Phenox的版权用于业务运作的方式。
