![]()
![]()


2012年12月12日08:50 來源:人民網-財經頻道
11月27-29日,中國汽車工程學會(SAE-China)在北京舉辦了FISITA(國際汽車工程學會聯合會)2012世界汽車工程年會。大會共包括10場技術分會和7場專題分會。
本次年會上,有效提交全文的論文680篇,內容含蓋了新能源汽車、內燃機、變速器、汽車電子、設計與測試、安全、底盤、NVH和ITS等領域。
由於演講場次眾多,筆者分身無術,本文將重點介紹會上親身所聞所見的一些技術點滴,以饗廣大讀者。
后軸電驅動和電力扭矩矢量控制方案
瑞典eAAM傳動系統AB公司(2012年2月被美國AAM收購)的Matilda Hallnor,在演講中介紹了后軸電驅動和電力扭矩矢量控制方案。該方案採用一個電機驅動,通過齒輪管理產生不同的速度。包括兩種情況:模式機械開關切換電動機的兩種牽引模式(這兩種模式不可同時產生)﹔獨立電動機作用於扭矩矢量控制。
橫向駕駛扭矩分配可以提高縱向及橫向分配的抓地力,通過建立瞬時偏航率模型,使車輛達到穩定或增加轉向的反應,實現動態修正橫向分配。電加速能力和在低附著路面(μ=0.3)的爬坡能力均有顯著提高。車輛動態能力優於四輪實時驅動。
在一階轉向反應試驗中,時速50km/h下,輪間扭矩為600Nm。13kW制動力和13kW驅動力作用於車輪,4kW功率來自2個獨立工作的電機,僅500W功率用於扭矩矢量功能。
用智能電氣化技術將汽油發動機體積縮小50%的HyBoost概念
來自英國Ricardo的Jason King在演講中介紹了在不影響車輛性能基礎上,利用智能電氣化技術將汽油發動機體積縮小50%的HyBoost概念,該方案還包括微混和電增壓技術。其優勢有以下幾方面:
①發動機體積縮小可在低成本下改善燃油經濟性﹔能在更高的負荷下工作,並產生較高的排汽焓。②電增壓可改善瞬態響應,提高增壓比﹔高速開關渦輪增壓軸上的磁阻電機,將熱能轉化為電能。③低成本儲能,12V AGM鉛酸蓄電池和超級電容器﹔支持發動機啟停及電加速的大電流運行﹔支持微混模式﹔兼容現有的12V汽車架構。④12V+XV皮帶驅動啟動電機(BSG)支持發動機起停(4kW)、制動能量回收(6kW)等功能。
集成了水增壓空氣冷卻器(WCAC)和LT冷卻器的吸氣模塊,高達90%的效率可以低溫充電並減少爆震,低壓EGR回路還能進一步緩解爆震特性。
為了研究高瞬態電流下的工作行為,對VRLA高碳鉛酸電池進行了充分的循環周期測試,結果表明,這種電池有可能替代超級電容儲能包。
King指出,電增壓系統極大地改善了發動機在低速時的瞬態響應特性,轉速為1500rev/min時,響應時間從3s減少到0.7s。
此外,HyBoost的功率和扭矩已從標准福克斯(Fox)發動機的基礎上實現升級。HyBoost發動機在轉速1500rev/min時實現了23bar BEMP,及29bar BEMP的最大扭矩。根據已修改的較大渦輪增壓規范進行的測試表明,實現了33 bar max BEMP。扭矩特性曲線的提高能夠盡量降低轉速。在採用福特1.0升3缸EcoBoost發動機進行研發時,功率和扭矩分別為116kW和260Nm。
King強調,HyBoost方案的CO2排放量接近了全混車的水平,比柴油動力系統的成本低。採用這種技術的福克斯車的CO2排放量不到99g/km。
增程式電動汽車
德國Mahle動力傳動公司為奧迪開發的緊湊型增程式電動汽車(REEV),從2010年1月開始研發,2012年10月已上路示范運行。
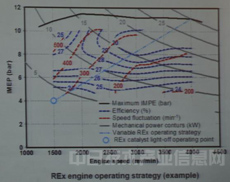
該車燃油排量900cc,直列雙缸發動機,採用水冷式鋰離子動力電池包,容量14kWh,額定電壓350V,集成式電源管理系統(BMS),馬達牽引力55kW(峰值100kW)。純電續駛裡程70公裡,總續駛裡程約500km,NEDC綜合工況下CO2排放量約為42g/km。增程式發動機運行策略、車輛燃油時的功率需求和增程器單元運行情況分別如圖1和圖2所示。
 |
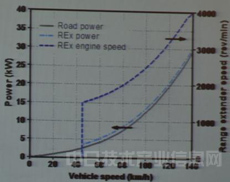 |
| 圖1 德國Mahle動力傳動公司開發的增程式電動汽車的發動機運行策略 | 圖2 車輛燃油時的功率需求和增程器單元運行情況 |
據悉,目前,該車還未完全實現制動能量回收,有些方面需要進一步完善。
中國一汽研發中心電動汽車部趙子良博士也介紹了自主研發的增程式電動汽車動力總成新技術。該車型採用雙缸發動機,鋰離子動力電池包容量為11kWh,充放電峰值功率分別為50和75kW,重量105kg,純電續駛裡程60公裡,總續駛裡程450km以上。
通過並聯拓扑、驅動模式、雙速傳動及減小發動機體積等技術,實現了:①短途行駛時,在CD模式工作下,由純電驅動﹔在CS模式工作下,低速時串聯驅動,高速時並聯驅動。②長途行駛時,在CD模式工作下,低速時純電驅動,高速時並聯驅動﹔在CS模式工作下,低速時串聯驅動,高速時並聯驅動。
動力電池和超級電容結合的雙電源供電系統
上海汽車集團(SAIC)新能源汽車與技術管理部高級工程師盧冶與浙江大學電力電子學院合作開發了用超級電容為電動汽車提供雙電源供電的系統。
盧冶介紹這項研究的初衷與目的時表示,目前,電動汽車設計工程師面臨著動力電池重量和數量與汽車性能、成本及效率匹配的問題。相對地,動力電池具有比能量高的特點,而超級電容具有比功率高的特點。通常,比能量是電動汽車的首要考慮因素。然而,電動汽車更長的續航裡程及更高的速度意味著需要更多的能量,相應的就要更重、更多的電池。如果把動力電池和超級電容結合,就可以很好地解決上述問題。
這種為電動汽車動力總成提供雙電源供電的系統(DPSS)以動力電池為主,超級電容為輔。動力電池、超級電容及電流負載的關系可簡化為如圖3左側所示。功率流動方向或雙電源為負載充放電的12種狀態可簡化為如圖3右側所示的8種狀態,這8種狀態涵蓋了短途電動汽車的所有功率模式。

圖3 雙電源供電系統的功率狀態流程圖
盧冶表示,已經開發出集成簡單控制邏輯和電流傳感器的BDC模塊,並成功應用在短途純電動汽車中。該模塊也可用於混動汽車上。測試結果表明,這種動力電池和超級電容結合的雙電源供電系統具有高效、快速功率響應和最大能量利用率。
基於仿真的純電動汽車能流研究
上海交大汽車電控技術國家工程實驗室王斌(音)團隊介紹了關於基於仿真的純電動汽車能流(energy flow)研究。用現有電動汽車的參數和狀態建立了一個高效、准確的能流仿真模型。
該研究的一個主要目的是從汽車系統級分析電動汽車的能流和能效。通過不同能源的相關配置對電動汽車性能所產生不同影響的分析,量化地顯示了不同零部件的能源分布與消耗。這些零部件包括儲能、能源傳輸、消耗、車輛動態、駕駛模型與車輛控制等分系統。同時,評估了動力電池、電機和不同動力總成拓扑對電動汽車性能的影響。
選用日產聆風(Leaf)純電動汽車對所開發的模型進行了驗証,行駛狀態為市區工況(NEDC),分別對行駛和制動模式進行了解釋。研究結果對以更加系統化與優化的方式設計電動汽車提供了指導。
車道線檢測系統
車道線檢測系統是車道偏離預警設備的核心,長安汽車工程研究院高峰等開發的基於FPGA的車道線檢測系統(LDS),為提高檢測准確率,重新設計了車道線提取和檢測控制狀態器模塊。
車道線提取的目的是從霍夫(Hough)變換生成的矩陣中提取有效的車道線參數。車道線提取算法如下:①閾值從矩陣最大值乘以一個系數得到,以使系統對不同道路狀況具有自適應性。②之后,為避免相鄰數值影響發現其他峰值,對相鄰數值清零。③在找出3個有效峰值后,用其對應的直線斜率判斷有效直線,提取斜率最大的直線作為有效車道線。
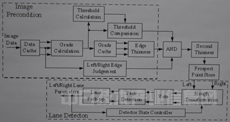
圖4 長安汽車工程研究院開發的車道線檢測系統FPGA電路,包括圖像預處理和車道線檢測兩部分。
檢測控制狀態器設計的目的是減少初始和跟蹤模式的處理數據。從初始模式到跟蹤模式:①計算兩個連續相鄰圖像的車道線參數間的偏差﹔②把連續計算的10個偏差值存進FIFO中﹔③當這些偏差值的個數大於事先設定的數值且小於閾值時,認定車道線檢測屬於穩定狀態。
從跟蹤模式到初始模式:①當偏差值大於閾值,或沒有找到有效車道線時,計數器加1。使用上一幅圖像的檢測區域,算法保持在跟蹤模式﹔②否則從計數器減1﹔③當計數器的值大於閾值時,從跟蹤模式轉換到初始模式。
車道線檢測的FPGA電路包括圖像預處理和車道線檢測兩部分(見圖4),並採用了Xilinx的Spartan6開發工具進行軟硬件協同仿真。
圖像預處理算法可消除環境干擾,在降低數據處理量的同時,保留了充分的車道線信息﹔處理速度為30fps﹔車道線檢測系統對文字、人行橫道和周圍車輛等有很強的抗干擾能力,在跟蹤模式下,車道線檢測准確率為100%。
基於相機的ADAS系統的光自我診斷技術
德國柏林IAV公司主動安全與駕駛員警告系統業務部由Tadjine Hadj Hamma領導的團隊開發了基於相機的ADAS系統的光自我診斷技術。
其開發背景是,基於相機的ADAS系統會經常受到天氣、環境、鏡頭失效及傳感器缺陷的困擾,導致可靠性降低,無法提供准確的道路安全信息。
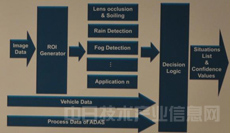
因此,所開發的光自我診斷技術的主要目的是檢測出故障狀態,並將系統轉換到失效安全級。診斷單元的特點是,①模塊化結構(見圖5),②適於各種情況,③記錄並報告車輛的各種狀態。
例如,光自我診斷技術可使基於相機的ADAS系統在霧天准確檢測並估算出視距,實驗結果如圖6所示。
 |
 |
| 圖5 光自我診斷單元的模塊化結構 | 圖6 光自我診斷技術可使基於相機的ADAS系統在霧天准確檢測並估算出視距(上半部兩圖為濃霧天氣,左下圖為中霧天氣,右下圖為晴天) |
動態導航無縫交通信息的更新
德國寶馬的Richard Wisbrun團隊研發了動態導航無縫交通信息更新的技術。其開發背景是,隨著交通流量的增長,遭遇堵車已成為平常事。這時,駕駛員便會不停地抱怨:“堵車什麼時候結束呀?”,“我都看見交通擁堵,車速已經慢下來了,可是為什麼沒有收到任何堵車的信息呢?”,“要是能收到可替換的不擁堵道路的信息就好了”,“昨天這個時候還不堵車呢,今天怎麼回事呀?”……。這種情況下,GPS導航單元的需求也在快速增加。交通導航系統輸入數據的精度和可靠性就成為各廠商獲取競爭優勢的焦點。
為此,寶馬用報警跟蹤器中的GPS和GSM模塊開發了緩解道路交通狀況的新方法。報警信息可從道路上設置的跟蹤器傳給服務提供商,然后通過TPEG傳送給駕駛員。這種導航系統的位置精度很高。
同時,還用車內信息通信平台重新定義了FCD方法,可以通過匯總各種傳感器信號數據,獲取更准確的交通狀態信息。xFCD邏輯可在車內實時過濾並融合數據。
此外,還實現了與道路系統一致的策略,由道路及城市管理者確定的策略路由(Strategic routes)可及時傳送給正在行駛的車輛,並集成到在線導航系統。(日經技術在線! 供稿)
