![]()
![]()


2013年04月15日10:22 來源:人民網-財經頻道
徹底確保故障時的安全
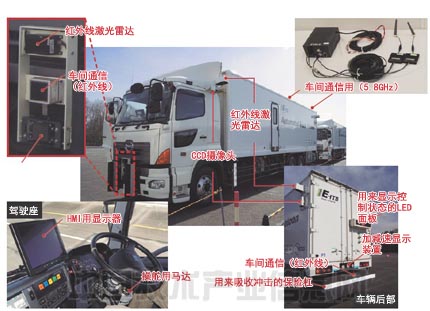
4米車距演示時,使用了三輛大型卡車和一輛小型卡車。大型卡車具備前方障礙物識別功能、道路標志線識別功能及車間通信功能(圖4)。所有功能均為兩套系統。具體而言,前方障礙物識別功能採用毫米波雷達和紅外線激光雷達,道路標志線識別功能採用攝像頭和紅外線激光雷達,車間通信功能採用5.8GHz頻帶無線通信模塊和紅外線光通信模塊。
 |
|
圖4 可保持4米車距的大型卡車 為了保持4米車距,配備了多個傳感器。為了識別前方障礙物,配備了毫米波雷達和紅外線激光雷達,為了識別道路標志線,在車輛側面配備了CCD攝像頭和紅外線激光雷達。車間通信採用5.8GHz頻帶無線模塊和紅外線光通信模塊。 |
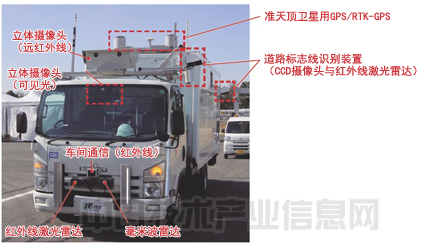
盡管並未在此次的成果展示會上演示,但小型卡車的目標是實現市區自動駕駛。因此,配備了可提高前方識別精度的立體攝像頭(可見光攝像頭和遠紅外線攝像頭兩種)、用於提高本車位置精度的准天頂衛星用GPS及RTK-GPS(圖5)。
 |
|
圖5 可保持4米車距的小型卡車 此次演示中做為第四輛隊列行駛車輛的小型卡車。除了隊列行駛之外,還以實現市區自動駕駛為目標,配備了兩種立體攝像頭、准天頂衛星用GPS、RTK-GPS。 |
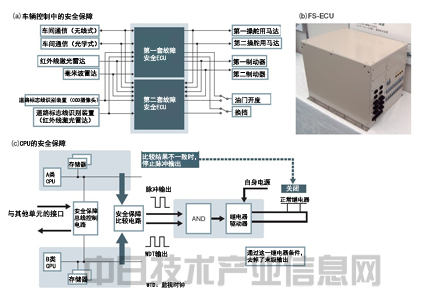
用來控制自動行駛和隊列行駛的裝置“FS-ECU”也為了確保安全性,配備了兩套系統(圖6)。不僅安裝了兩塊控制用基板,而且控制基板的CPU內核也配備了兩個,增加了CPU內核之間可相互監控計算結果的故障安全功能。比較電路採用FPGA。
 |
|
圖6 徹底確保故障安全 試制的系統徹底確保了故障安全(a)。傳感器及用於控制的ECU也採用了兩套系統。開發出了配備兩塊控制基板的“FS-ECU”,基板的CPU實現了雙重化。CPU利用比較電路實時進行狀態監控(c)。 |
FC-ECU的控制方法參考了構建高可靠性系統的鐵路車輛控制裝置的思路。鐵路車輛能夠根據來自自動列車控制裝置(ATC)等的控制信號,自動調整車輛速度等,此次便利用了這種原理。因此,FS-ECU由從事鐵路車輛控制裝置業務的日本大同信號公司負責開發。FS-ECU及傳感器的長期可靠性評估由東京大學生產技術研究所負責。東京大學、大同信號、電裝公司、弘前大學共同在宇部興產設在山口縣的約30公裡的汽車專用道上實施了實地試驗。另外,電裝負責開發使用紅外線激光雷達的道路標志線識別功能,弘前大學負責開發採用攝像頭的道路標志線識別功能。
實際行駛時,除了上述各種傳感器提供的信息之外,還使用了地圖數據。領頭車輛根據地圖數據、前方識別及道路標志線識別結果自動行駛。后方車輛則在利用傳感器識別前方車輛的同時,通過車間通信,以20ms的通信周期獲取領頭車輛的速度等信息。
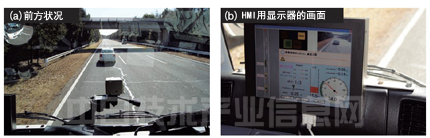
盡管4米車距演示時無法登車隨行,但在車距擴大至10米的隊列行駛時記者可以隨行。10米車距演示的內容是,使用三輛大型卡車,在實現自動駕駛的同時,讓領頭車輛檢測前方的低速車輛並追蹤其速度。實施了從80公裡時速降至60公裡的追蹤,以及從80公裡降至30公裡的追蹤兩種演示(圖7)。而且,還進行了發現障礙物后通過緊急制動來避免碰撞的演示,以及領頭車輛不採用自動駕駛,當駕駛員操作車輛橫跨道路標志線駕駛時,后方車輛追隨前方車輛的追蹤控制演示。
 |
|
圖7 保持10米車距進行隊列行駛 在此次演示中,3輛卡車以80公裡時速、10米車距進行隊列行駛時,可以登車隨行。進行了自動追蹤低速車的演示。 |
 |  |
