![]()
![]()


2012年11月21日09:58 來源:人民網-財經頻道
2012年5月,本田公司公開了電動獨輪車“UNI-CUB”。為了推動實用化,目前正在位於東京台場的日本科學未來館中進行實証實驗。設想用作機場及購物中心等大型設施中的移動工具。
“機場、購物中心及水族館等室內設施正在向大型化發展,人們在其中的逗留時間及移動時間增多,因此需要備有以前沒有的‘個人交通工具’。‘UNI-CUB’就是一款可滿足既安全又能高效率移動這種需求的全新交通工具”,本田技研研究所二輪R&D中心策劃室主任研究員末田健一這樣介紹說。
僅需傾斜身體即可控制轉向
UNI-CUB是本田技研開發的電動獨輪車。僅需將上半身稍稍向希望去的方向傾斜,即可隨意向前后、左右及斜向等所有方向移動。並且,與以往的獨輪車和自行車不同,停下時不會傾倒,能夠穩穩立於原地,此外還能夠以車輪與地面的接觸點為中心,進行360度旋轉。即使沒有經過練習,在騎上車的瞬間就能立刻憑直覺操縱車輛,這也是其特點之一。


“UNI-CUB(UNI-CUB)”。“UNI”源自Unicycle,Unique,Universal 。其設計乍看就像一隻企鵝。
只是通過改變上半身的重心來操控車輛,因此可簡單地配合旁邊行人的步調,也不存在像汽車和摩托車那樣突然加速的危險。即使在機場和購物中心等人流量較大的室內設施中,也不會給周圍行人帶來壓力和恐懼感,可安心共享空間。
並且在使用方法方面,還可事先在UNI-CUB中輸入參觀路線及速度,使參觀者能夠順利按照預定時間參觀博物館和展會等,而不會出現迷路的情況。
末田說:“說到通過移動重心行駛的個人交通工具,Segway比較有名。不過,UNI-CUB的最大特點在於可自由使用雙手,車輪完全收納於騎車人兩腳內側,這也是我們在開發時最注重的地方。”
這一想法的基礎是本田長年以來一直堅持的“Man-Maximum•Mecha-Minimum(乘員空間最大化,機器空間最小化)”思想。

本田技研研究所二輪R&D中心策劃室主任研究員末田健一
UNI-CUB的最高時速為6公裡,充滿電的續航距離為6公裡,但通過改變電池容量,可改變性能指標。另外,如果將使用環境設定為適用無障礙空間,隻要符合《無障礙法》標准的斜坡及台階,就可毫不費力地通過。騎行者的體重設想為30∼100公斤。
上市時間目前尚未確定。已從6月16日起,在東京台場日本科學未來館投入使用,進行實証實驗。遺憾的是,目前隻有日本科學未來館的解說員才能使用。根據驗証實驗的結果,或許參觀者不久就能利用這一交通工具。
末田說:“我們本來打算通過實証實驗,首先使人們了解到‘竟然有這樣的交通工具’。不過,實証實驗開始之后,由於該車太易於融入周圍空間,因此也有許多參觀者並未意識到獨輪車的存在,這倒是令人高興的失算。”
這樣看來,UNI-CUB似乎已經達到了自然而然地融入人流量較大的空間這一理念要求。今后,為了使人們對之產生“自己也想騎”、“使用這種交通工具或許會比較方便”的想法,本田技研計劃通過實証實驗找出需要解決的問題,反復進行進行改良。
以較少部件實現安全可靠的驅動機構
UNI-CUB有兩個技術關鍵。即可進行全方位移動的車輪機構“Honda Omni Traction Drive System(HOT驅動系統)”,和在類人機器人“阿西莫”研發過程中積累的平衡控制技術。
HOT驅動系統是在大車輪的圓周上配置一排小車輪的車輪機構。UNI-CUB的車輪配備有30多個小型車輪。
可通過轉動大車輪進行前后移動,轉動多個小車輪進行左右移動,並可通過組合使用大車輪及小車輪進行斜向移動。
順便一提,此次UNI-CUB除了“主輪”外,還在主輪后部設置有“旋轉車輪”。正如其名稱一樣,該車輪可使主輪以1點為中心進行360度旋轉。

“Honda Omni Traction Drive System(HOT驅動系統)”
實際上,在大車輪的圓周上配置一排小車輪的車輪機構被稱為“全方位輪”或者“全方位驅動車輪”,這並沒有什麼新奇之處。而HOT驅動系統的獨特之處在於,不僅僅是大車輪,就連小車輪的移動都是通過計算機進行精密控制。這樣能夠使騎行者更順利、更准確地駕車駛往自己想去的方向。
而且,對小車輪“統一”進行控制,而不是一個一個單獨進行控制,這一點也頗具本田特色。
對於末田等研發人員來說,一個一個單獨進行控制在技術方面並不困難。不過這樣一來,便需要大量部件以及大電流電路,與末田等力爭實現的低價位小型產品相距甚遠。但如果不能完全控制小車輪,便無法實現精密的驅動。
末田說:“如何用較少的部件實現安全、可靠地進行驅動的機構,在這方面我們花費精力最多,也充分利用了本公司長年以來積累的相關技術。”
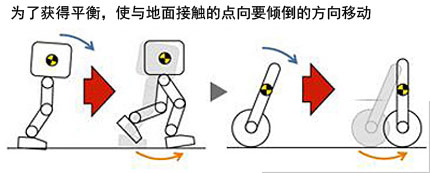
另一方面,平衡控制技術指的是保持重心平衡、防止摔倒的技術。
該技術是通過傳感器檢測UNI-CUB騎行者上半身移動所產生的重心傾斜,迅速判斷騎行者想向哪個方向、以多快的速度移動。然后迅速將車輪向該方向移動,以保持重心平衡。不僅是向上半身傾斜的方向移動,而且上半身傾斜程度越大,車輪轉速就越快,騎行速度也加快。
應該有許多人在小時候當值日生時,做過將掃帚一頭放在手掌上,盡力使其保持平衡而不歪倒的游戲。UNI-CUB配備的平衡控制技術原理正是與之相同,是通過計算機控制得以實現的。
平衡控制技術
本田於2011年發布的UNI-CUB的原型為不能如意地移動重心的人配備了像游戲機一樣的操縱杆。不過,此次採用了智能手機來替代操縱杆。用手指操作觸摸面板畫面上顯示的操縱杆,便可指示移動方向。
順便一提,筆者也進行了試騎,UNI-CUB的動作非常流暢,完全沒有操縱交通工具的感覺。反而有一種宛如身體一部分的奇妙感覺。這的確是一種前所未有的交通工具。
配備阿西莫等的平衡控制技術
本田技術研究所的個人交通工具研發歷史可以回溯到1989年。最初是在公司內部舉行的新一代交通工具創意大賽上,展示了作為Segway前身的摩托車,以及利用旋轉的大球移動的獨球車。這些交通工具都是利用了平衡控制技術。
之后,隨著研究設施等的增擴,在設施之間進行移動越來越麻煩。特別是負責將文件等送往各部門的工作人員,每天必須在設施內來回走動多達7到8公裡,非常辛苦。
因此,本田技研以1989年發布的獨球車為原型,在1994年開發出了小型獨輪車。不過需要像Segway一樣雙手握住車把,雖然移動起來較為輕鬆,但不能自由使用雙手。因此作為下一個目標,決定開發“無需用手”的技術。
不過之后開發進展得並不順利。負責獨輪車研發的研究人員開始致力於阿西莫等類人機器人的研發,獨輪車研發被暫時縮小了規模。不過,通過研發類人機器人,平衡控制技術得到了大幅提高。因此,研究人員想,通過再次在獨輪車中採用該平衡控制技術,就能夠實現無需用手的個人交通工具了吧。
於是,15年之后,於2009年開發出了前一款產品“U3-X”。
U3-X最注重小型化及設計性。因此,雖然人騎上去也能僅靠一個車輪很好地保持平衡,但驅動力較低,路面稍有凹凸不平之處就會停住,無法繼續前行。並且,由於沒有配備旋轉車輪,因此也無法像UNI-CUB一樣在原地旋轉。

無需用手的電動獨輪車“U3-X”(右)與UNI-CUB
而UNI-CUB是對U3-X進行了改良,實現了較好的路況應對能力。
由於UNI-CUB比較注重實用性,因此末田等研發人員從車輪形狀、尺寸到材質,進行了全面改進。
末田說:“我們試制了約100多種的機構,反復進行了實驗。尤其是發現了將重點放在盡可能降低成本上,通過優化組合利用現有技術,可產生新的效果。雖然不能進行詳細介紹,但對於技術人員來說,這個發現是UNI-CUB開發過程中最大的收獲,非常有意義。”
本田技研今后將力爭盡早實現UNI-CUB的商品化,並考慮通過將HOT驅動系統及平衡控制技術等應用於其他領域,推動新產品開發。
末田最后說道: “從自行車、摩托車、汽車、鐵路到電梯,我們人類不斷推進交通工具的發展,構筑了豐富的社會及城市。不過,有些場所仍需要採用像UNI-CUB這樣的交通工具。這種需求也將隨著時代的變化而變化。今后我們將繼續開發受人們歡迎的交通工具,使更多人的生活質量得到提高,形成更豐富的社會。”(日經能源環境網 供稿)
