![]()
![]()


2014年05月26日08:39
【新聞鏈接】
生物電子誕生(一)生物體內的寶藏,將帶來控制、傳感器和節能革命
一盤磁帶容量達154TB !IBM和富士膠片創磁帶存儲密度新記錄
魚、昆虫隻有簡單的腦,黏菌甚至根本沒有腦。但與人類相比,這些生物的動作性能卻非常高。通過分析其機制,可以實現前所未有的聰明控制。
“迄今仿生制造的著眼點大多是生物的‘物(結構)’。而今后,研究生物的動作及其原理,也就是‘事’將更加重要”。
控制技術專家、大阪大學研究生院工學研究科機械工學專業教授大須賀公一強調說。大須賀是“仿事”的提倡者,就是從控制的角度來看生物的動作和活動等,解明並利用生物的控制結構。意圖是通過探求其本質,獲得“放之生物而皆准”的知識。
大須賀指出,東北大學電氣通信研究所教授石黑章夫的研究成果就是仿生技術的一個好例子。石黑發現生物具備的自主分布式控制的原理,並將其應用於四足行走機器人,使機器人實現了像馬一樣的自然行走。
此前的行走機器人大多採取的是依賴高性能中央運算裝置的“集中式強壓控制方法”(石黑)。而自然界連沒有腦的原始生物,也能相應於無法預測的環境變化而移動。就是說,即使沒有高性能的中央運算裝置,也有可能實現像生物那樣靈活的動作。這是因為生物體的動作是以自主分散的控制方法進行的,其體內分散配置的各個單元都會自主地協調動作。實際上,在某些昆虫的體內,存在著名為“擴散神經”的分散式神經網絡。
研究真黏菌的動作
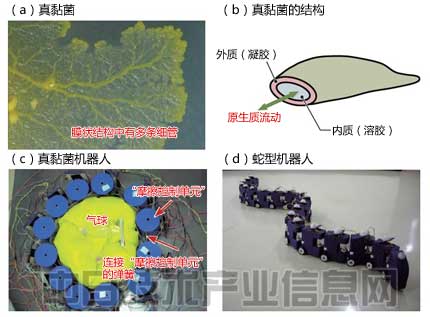
在研究生物的自主分布式控制方式的時候,石黑把目光對准了結構和動作單一的“真黏菌”(圖1)。這是“變形菌”的一種,沒有腦和神經。即便如此,這種菌依然會像動物一樣到處尋找食物。真黏菌由溶膠狀的“內質(原生質)”與凝膠狀的“外質”組成。在移動時,真黏菌是通過外質各個部分的收縮、舒張,使內質發生流動,從而帶動身體運動。
 |
|
圖1:試制模擬真黏菌的機器人 東北大學試制了真黏菌型機器人(a)。真黏菌由溶膠狀的“內質”和凝膠狀的“外質”組成(b)。裝滿水的氣球充當內質,配置在氣球周圍的多個“摩擦控制單元”通過彈簧連接成環狀,作為外質(c)。真黏菌的自律控制規則運用於蛇型機器人,成功對其進行了驅動(d)。(圖:《日經電子》根據東北大學的資料制作) |
石黑為了探索真黏菌的自主分布式控制方法,試制出了模仿真黏菌的機器人。用裝滿水的氣球代替內質部分。外質採用的則是用彈簧連接多個機械單元(摩擦控制單元)組成的環狀體。
彈簧既能被動也能主動運動。這款機器人的原理,是在調整彈簧的長度和摩擦控制單元與地面之間的摩擦系數的同時,通過擠壓、拉伸內部的氣球,使整體實現移動。
石黑為這台機器人採用自己推測出的自主分布式控制規則,在驅動機器人運動后,再根據結果修改自主分布式控制規則,重新在機器人身上進行嘗試。經過不斷摸索,終於得到了動作與實際真黏菌一致的自主分布式控制規則。其重點是在彈簧伸縮的時候,增加調整伸縮時間(相位)的項目,以防止彈簧承受超出其能力范圍的力。在這一項目中,要以“差距函數”減少為前提,調整伸縮的時機。差距函數以公式的形式,表現出了控制系統與機構系統、周圍環境之間產生的“差距”。
具有普遍性的齟齬函數
石黑發現,通過真黏菌得到的自主分布式控制規則與很多生物相通之處頗多。實際上,在對蛇型機器人直接採用這種自主分布式控制規則后,與石黑開發的老式蛇型機器人相比,其動作更接近於真蛇。當然,蛇的結構比真黏菌復雜得多,要想實現更接近蛇的動作,還需要研究出專用的自主分布式控制規則。
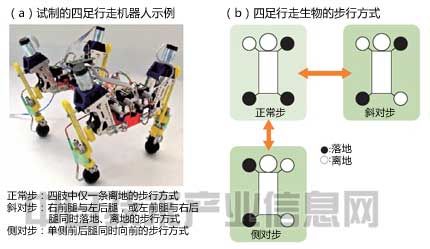
然而,“基於齟齬函數的設計方案可以運用於其他生物的自主分布式控制規則”(石黑)。根據這一思路,石黑成功試制出了四足行走機器人(圖2)。並且通過這台機器人,得到了能夠像馬、貓等四足行走的動物一樣運動的自主分布式控制規則。這種控制規則“適用於馬、駱駝、貓等所有四足行走的生物”(石黑)。四足行走生物實際的行走方式存在許多差異,例如四肢中隻有一條離地的“正常步”,右前腿和左后腿對角線同時落地、離地的“斜對步”等。這是“因為每種動物的重心不同”(石黑)。實際上,在四足行走的自主分布式控制規則中加入不同動物的重心信息后,行走方式也會隨之改變。使貓像貓,馬像馬,駱駝像駱駝那樣行走。
 |
|
圖2:流暢的四足行走成為現實 東北大學為試制的多種四足行走機器人採用了真黏菌的自律控制規則(a)。在實驗過程中,又發現了能夠實現“正常步”、“斜對步”、“側對步”等四足行走的公式(b)。(圖:《日經電子》根據東北大學的資料制作) |
而且,試制的四足行走機器人可以從靜止狀態馬上進入行走狀態。一條腿發生故障時,其他腿會採取相應的動作,消除故障的影響。
今后,石黑還將把范圍擴大到雙足行走機器人、海星型機器人等眾多機器人,繼續致力於研究不同生物的自主分布式控制規則。
 |
