![]()
![]()


2013年04月15日10:22 来源:人民网-财经频道
彻底确保故障时的安全
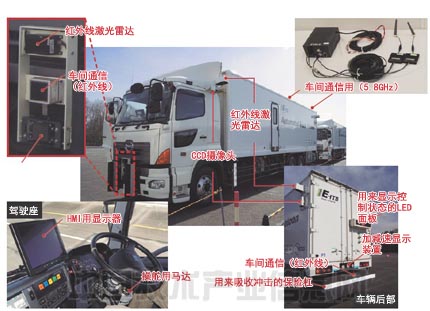
4米车距演示时,使用了三辆大型卡车和一辆小型卡车。大型卡车具备前方障碍物识别功能、道路标志线识别功能及车间通信功能(图4)。所有功能均为两套系统。具体而言,前方障碍物识别功能采用毫米波雷达和红外线激光雷达,道路标志线识别功能采用摄像头和红外线激光雷达,车间通信功能采用5.8GHz频带无线通信模块和红外线光通信模块。
 |
|
图4 可保持4米车距的大型卡车 为了保持4米车距,配备了多个传感器。为了识别前方障碍物,配备了毫米波雷达和红外线激光雷达,为了识别道路标志线,在车辆侧面配备了CCD摄像头和红外线激光雷达。车间通信采用5.8GHz频带无线模块和红外线光通信模块。 |
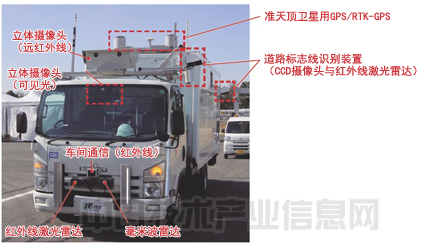
尽管并未在此次的成果展示会上演示,但小型卡车的目标是实现市区自动驾驶。因此,配备了可提高前方识别精度的立体摄像头(可见光摄像头和远红外线摄像头两种)、用于提高本车位置精度的准天顶卫星用GPS及RTK-GPS(图5)。
 |
|
图5 可保持4米车距的小型卡车 此次演示中做为第四辆队列行驶车辆的小型卡车。除了队列行驶之外,还以实现市区自动驾驶为目标,配备了两种立体摄像头、准天顶卫星用GPS、RTK-GPS。 |
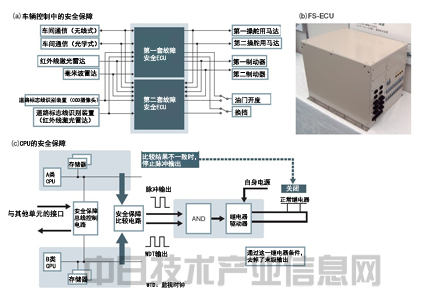
用来控制自动行驶和队列行驶的装置“FS-ECU”也为了确保安全性,配备了两套系统(图6)。不仅安装了两块控制用基板,而且控制基板的CPU内核也配备了两个,增加了CPU内核之间可相互监控计算结果的故障安全功能。比较电路采用FPGA。
 |
|
图6 彻底确保故障安全 试制的系统彻底确保了故障安全(a)。传感器及用于控制的ECU也采用了两套系统。开发出了配备两块控制基板的“FS-ECU”,基板的CPU实现了双重化。CPU利用比较电路实时进行状态监控(c)。 |
FC-ECU的控制方法参考了构建高可靠性系统的铁路车辆控制装置的思路。铁路车辆能够根据来自自动列车控制装置(ATC)等的控制信号,自动调整车辆速度等,此次便利用了这种原理。因此,FS-ECU由从事铁路车辆控制装置业务的日本大同信号公司负责开发。FS-ECU及传感器的长期可靠性评估由东京大学生产技术研究所负责。东京大学、大同信号、电装公司、弘前大学共同在宇部兴产设在山口县的约30公里的汽车专用道上实施了实地试验。另外,电装负责开发使用红外线激光雷达的道路标志线识别功能,弘前大学负责开发采用摄像头的道路标志线识别功能。
实际行驶时,除了上述各种传感器提供的信息之外,还使用了地图数据。领头车辆根据地图数据、前方识别及道路标志线识别结果自动行驶。后方车辆则在利用传感器识别前方车辆的同时,通过车间通信,以20ms的通信周期获取领头车辆的速度等信息。
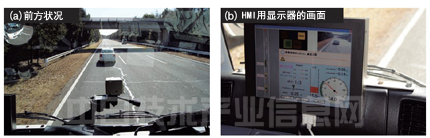
尽管4米车距演示时无法登车随行,但在车距扩大至10米的队列行驶时记者可以随行。10米车距演示的内容是,使用三辆大型卡车,在实现自动驾驶的同时,让领头车辆检测前方的低速车辆并追踪其速度。实施了从80公里时速降至60公里的追踪,以及从80公里降至30公里的追踪两种演示(图7)。而且,还进行了发现障碍物后通过紧急制动来避免碰撞的演示,以及领头车辆不采用自动驾驶,当驾驶员操作车辆横跨道路标志线驾驶时,后方车辆追随前方车辆的追踪控制演示。
 |
|
图7 保持10米车距进行队列行驶 在此次演示中,3辆卡车以80公里时速、10米车距进行队列行驶时,可以登车随行。进行了自动追踪低速车的演示。 |
 |  |
