![]()
![]()


2013年08月28日09:22
【相关新闻】
2013年5月,一辆在日本首都高速公路上行驶的乘用车突然减速,被正后方驶来的卡车追尾,酿成了事故。乘用车突然减速的原因是“自动制动功能”的误操作。这项原本应该提高安全性的功能却引发了意想不到的事故。
在这起事故中,突然减速的乘用车是2012年12月上市的丰田“皇冠”。该车配备了名为“预防碰撞安全系统”(PCS)的自动制动功能。PCS是皇冠提供的选配功能“Advanced Package”中的一项安全功能,作用是在车辆可能撞上前方车辆或障碍物时,帮助驾驶员避免碰撞(图1)。
 |
|
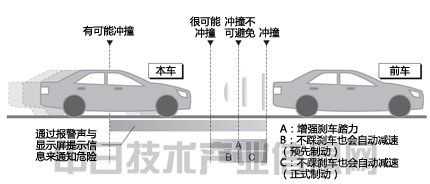
图1:丰田的“预防碰撞安全系统”(PCS ) 工作分两个阶段,先通过报警蜂鸣器和显示器显示提醒驾驶员回避危险,然后是控制制动器。 |
时速突然减至10km以下
皇冠PCS的工作分两个阶段。首先,当本车距离前方车辆或障碍物很近时,或是本车行驶速度远高于前车、有可能发生冲撞时,PCS的控制系统将通过蜂鸣器报警(听觉)和显示器显示(视觉)两种方式,提醒驾驶员采取行动以避免冲撞。
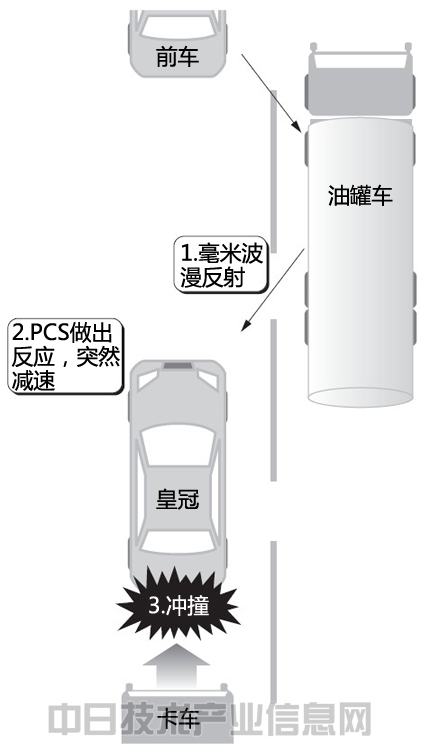
图2:冲撞事故概要
PCS因接收到漫反射的毫米波而发生了误操作。因此,突然减速的皇冠被后面的卡车追尾。
当本车与前方车辆或障碍物的距离更近、冲撞的可能性较高时,控制系统会继续通过警报声和显示屏提示进行提醒,同时开始控制制动器,帮助驾驶员避免冲撞。此时,如果驾驶员在操作制动器(已踩下制动踏板),则增强踏力进行辅助(图1的A),如果驾驶员未操作制动器(没有踩下制动踏板),则实施自动制动(图1的B和C)。
检测前方车辆及障碍物使用的是频率为76GHz频带的毫米波雷达。具体来说,就是向本车前方发射毫米波,接收接触前方车辆及障碍物后返回的毫米波。然后,根据毫米波往返的时间和频率变化量等数据,计算出本车与前方车辆或障碍物的距离,以及本车与前车之间的相对速度。
通过上述控制,在驾驶员操作制动器时,时速最大可降低60km左右,未操作制动器时最大可降低30km左右,由此来避免冲撞或是减轻冲撞的危害。PCS启动的条件是本车的行驶速度达到时速15km以上,且本车与前车的相对速度在时速15km以上。
在这次事故中,正在行驶的皇冠虽然没有与前方车辆或障碍物碰撞的风险,PCS却执行了操作。因为操作失误,之前以大约30km的时速行驶的皇冠突然减速至时速10km以下,导致被后面的卡车追尾。
在这次事故前后,丰田共接到了5起类似故障的报告。感到事态严重的丰田决定召回配备PCS的皇冠与“雷克萨斯”品牌的“IS300h”、“IS250”、“IS350”这四款车型,于2013年6月26日向日本国土交通省提交了召回申请。召回数量皇冠约为1.9万辆,雷克萨斯3款车型共计约1000辆。
丰田将对根据毫米波雷达信息检测前方车辆及障碍物的软件的逻辑进行修正。该公司呼吁上述四款车的驾驶员,在修正软件之前,暂时关闭PCS。
 |
