![]()
![]()


2013年08月28日09:22
【相關新聞】
2013年5月,一輛在日本首都高速公路上行駛的乘用車突然減速,被正后方駛來的卡車追尾,釀成了事故。乘用車突然減速的原因是“自動制動功能”的誤操作。這項原本應該提高安全性的功能卻引發了意想不到的事故。
在這起事故中,突然減速的乘用車是2012年12月上市的豐田“皇冠”。該車配備了名為“預防碰撞安全系統”(PCS)的自動制動功能。PCS是皇冠提供的選配功能“Advanced Package”中的一項安全功能,作用是在車輛可能撞上前方車輛或障礙物時,幫助駕駛員避免碰撞(圖1)。
 |
|
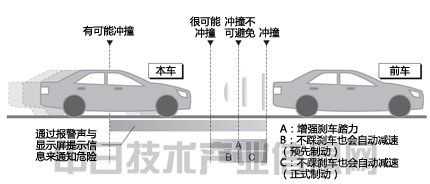
圖1:豐田的“預防碰撞安全系統”(PCS ) 工作分兩個階段,先通過報警蜂鳴器和顯示器顯示提醒駕駛員回避危險,然后是控制制動器。 |
時速突然減至10km以下
皇冠PCS的工作分兩個階段。首先,當本車距離前方車輛或障礙物很近時,或是本車行駛速度遠高於前車、有可能發生沖撞時,PCS的控制系統將通過蜂鳴器報警(聽覺)和顯示器顯示(視覺)兩種方式,提醒駕駛員採取行動以避免沖撞。
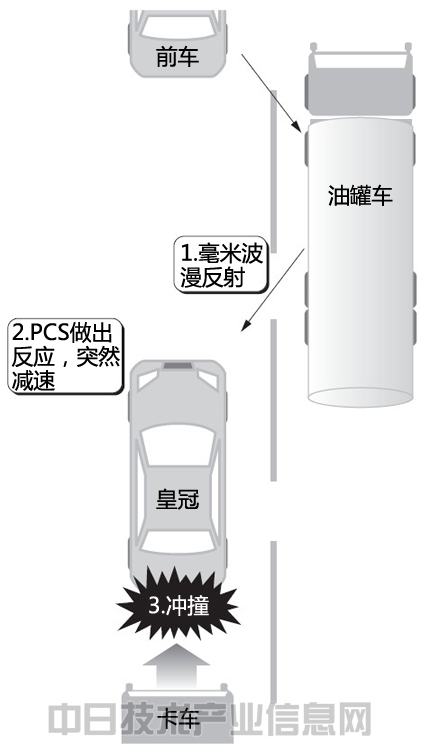
圖2:沖撞事故概要
PCS因接收到漫反射的毫米波而發生了誤操作。因此,突然減速的皇冠被后面的卡車追尾。
當本車與前方車輛或障礙物的距離更近、沖撞的可能性較高時,控制系統會繼續通過警報聲和顯示屏提示進行提醒,同時開始控制制動器,幫助駕駛員避免沖撞。此時,如果駕駛員在操作制動器(已踩下制動踏板),則增強踏力進行輔助(圖1的A),如果駕駛員未操作制動器(沒有踩下制動踏板),則實施自動制動(圖1的B和C)。
檢測前方車輛及障礙物使用的是頻率為76GHz頻帶的毫米波雷達。具體來說,就是向本車前方發射毫米波,接收接觸前方車輛及障礙物后返回的毫米波。然后,根據毫米波往返的時間和頻率變化量等數據,計算出本車與前方車輛或障礙物的距離,以及本車與前車之間的相對速度。
通過上述控制,在駕駛員操作制動器時,時速最大可降低60km左右,未操作制動器時最大可降低30km左右,由此來避免沖撞或是減輕沖撞的危害。PCS啟動的條件是本車的行駛速度達到時速15km以上,且本車與前車的相對速度在時速15km以上。
在這次事故中,正在行駛的皇冠雖然沒有與前方車輛或障礙物碰撞的風險,PCS卻執行了操作。因為操作失誤,之前以大約30km的時速行駛的皇冠突然減速至時速10km以下,導致被后面的卡車追尾。
在這次事故前后,豐田共接到了5起類似故障的報告。感到事態嚴重的豐田決定召回配備PCS的皇冠與“雷克薩斯”品牌的“IS300h”、“IS250”、“IS350”這四款車型,於2013年6月26日向日本國土交通省提交了召回申請。召回數量皇冠約為1.9萬輛,雷克薩斯3款車型共計約1000輛。
豐田將對根據毫米波雷達信息檢測前方車輛及障礙物的軟件的邏輯進行修正。該公司呼吁上述四款車的駕駛員,在修正軟件之前,暫時關閉PCS。
 |
